Safety over EtherCAT Drive Profile
In a safety system with safety logic the safety drive gets safety commands from the safety logic. These commands should activate integrated safety functions in the drive. The drive should send status information to the safety logic, so that the safety logic can react according to the status of the drive, e.g. to enable a following action (e.g. open a safety gate).
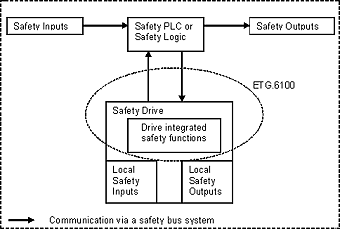
The safety drive can also provide local safety inputs and safety outputs. The safety inputs can be used to activate internal safety functions or can be assigned to the safety status information. The safety outputs can be used to assign safety status information or can be set by the command information of the safety logic.
The ETG.6100 series defines a Safety Drive Profile for the Safety over EtherCAT (FSoE) Technology, which is defined in ETG.5100.
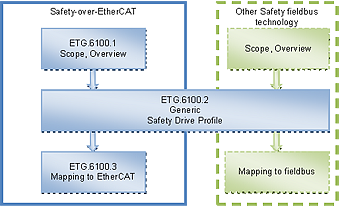
It consists of the following parts:
- Part 1, ETG.6100.1, gives a general scope and an overview of the related parts.
- Part 2, ETG.6100.2, defines a generic safety drive profile for a drive with integrated safety functionality. It defines the process data structure and the safety objects in the drive for the configuration of various safety functions according to the IEC 61800 5 2. There are no Safety over EtherCAT relevant definitions. This part can also be used as a Safety Drive profile for other Safety fieldbus technologies.
- Part 3, ETG.6100.3, specifies the mapping of the generic Safety Drive Profile to the Safety over EtherCAT technology.
| 描述 | 语言 | 类别 | 日期 | 大小 | 版本 | 状态 | |
|---|---|---|---|---|---|---|---|
 |
ETG.6100 Safety Drive Profile | EN | ZIP | 2020年7月15日 | 1,42 MB | 1.3.0 | Release |
You may not copy, distribute or “mirror” the files or printed versions of the documents, or any part of it, without permission in writing from the ETG (EtherCAT Technology Group).