EtherCAT - イーサネットフィールドバス
このセクションはEtherCAT (Ethernet for Control Automation Technology)を詳しく紹介します。以下の内容はEtherCATブローシャーでも解説し、各種言語で用意しています。
EtherCATはベッコフオートメーションが開発したリアルタイム性のある産業イーサネット技術です。EtherCATプロトコルがIEC規格IEC61158で公開され、オートメーション技術、試験・計測技術およびその他の多数のアプリケーション分野に適したハードリアルタイムおよびソフトリアルタイム性能を提供します。
EtherCATを開発する際に最も留意したことは、短周期のサイクルタイム(≤ 100 µs)、精度の高い時刻同期(≤ 1 µs)を可能とする低ジッタおよび低ハードウェアコスト化です。
EtherCATは2003年4月に公表され、その年の11月にEtherCAT Technology Groupを設立しました。その後ETGは世界最大の産業用イーサネット・フィールドバス団体に成長しました。ETGはデバイスメーカとユーザを結びつけ、両者が技術作業部会でEtherCAT技術の進展に貢献できるように注力しています。
1. EtherCATの特徴
1.1 動作原理1.2 EtherCATプロトコル
1.3 トポロジの柔軟性
1.4 EtherCAT P: 1つのケーブルで通信と電源供給
1.5 ディストリビュートクロックによる高精度時刻同期
1.6 診断とエラー箇所の特定
1.7 高可用性
1.8 Safety over EtherCAT
1.9 通信プロファイル
1.9.1 CAN Application Protocol over EtherCAT (CoE)
1.9.2 IEC 61491-7-204 over EtherCAT (SoE)に準拠したサーボドライブプロファイル
1.9.3 Ethernet over EtherCAT (EoE)
1.9.4 File Access over EtherCAT (FoE)
1.9.5 ADS over EtherCAT (AoE)
1.10 EtherCATオートメーションプロトコル(EAP)によるプラントレベル通信
1.11 他フィールドバスシステムの統合
1.12 EtherCAT, TSN, Industrie 4.0 & IoT
2. EtherCATインタフェースの実装
2.1 Mainデバイス2.2 Subデバイス
3. コンフォーマンスと認証
3.1 プラグフェスト3.2 コンフォーマンステストツール
3.3 コンフォーマンス技術作業部会
3.4 EtherCATテストセンタ
4. 国際規格
1. EtherCATの特徴
1.1 動作原理
EtherCAT Mainデバイスはフレームを送信し、フレームは各ノードを通過していきます。各EtherCAT Subデバイスはフレームに対して「オンザフライ」で自身にアドレス指定されたデータをリードやライトを行い、フレームは次のSubデバイスに移動します。Subデバイス通過時の遅延はハードウェア伝送処理遅延だけです。セグメント (または分岐) の終端のSubデバイスは、その次に接続されたSubデバイスがないことを検出し、イーサネットの全二重通信の性質を利用してフレームをMainデバイス側に戻します。
フレームの通信データレート最大効率は90%を超え、全二重の性質を活用すると理論的なデータレート効率は100Mbit/sより大きくなります (90%以上の効率で双方向)。
EtherCAT MainデバイスはEtherCATフレームをセグメント内に自身で送出可能な唯一の通信ノードです。その他のSubデバイスノードはフレームを次のノードにフォワードすることしかできません。この概念によって予測不可能な遅延が発生する可能性がなく、リアルタイム通信機能を保証できます。
Mainデバイスは通信用プロセッサを追加する必要はなく、標準イーサネット・メディアアクセスコントローラ (MAC) を使用します。つまり、Mainデバイスはイーサネットポートのあるハードウェアプラットフォームであれば実装可能であり、リアルタイムオペレーティングシステム(OS)やアプリケーションソフトウェアの種類は問いません。EtherCAT SubデバイスはEtherCAT Subデバイスコントローラ (ESC) を使用し、完全にハードウェアによってオンザフライでフレームを処理します。したがってネットワーク性能は予測可能となり、それぞれのSubデバイスの実装方法に依存しません。
1.2 EtherCATプロトコル
EtherCATのデータペイロードは標準イーサネットフレームを使用します。フレームはEtherCAT通信であることを表すためのイーサタイプ 0x88A4を使用します。EtherCATプロトコルは高速サイクルタイムのプロセスデータに最適化され、TCP/IPやUDP/IPのようなプロトコルオーバーヘッドの大きな通信方式とは異なります。

標準イーサネットフレーム(IEEE802.3準拠)によるEtherCATフレーム
ノード間でイーサネットのIT通信を行えるように、リアルタイムデータ通信に影響を与えることなくTCP/IPコネクタションをメールボックスチャネル経由でトンネル化できます。
起動時にMainデバイスはSubデバイスのプロセスデータを設定し、マッピングします。例えばあるSubデバイスは1ビットから数バイト、別のSubデバイスは最大キロバイトサイズのデータのようにSubデバイスごとに違うデータサイズでも交換可能です。
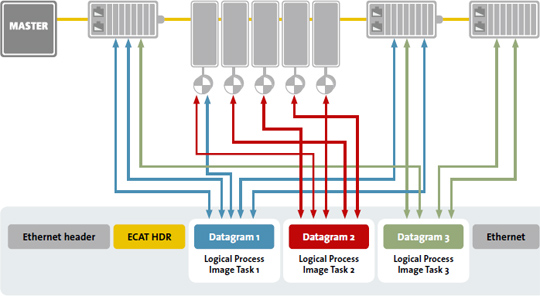
EtherCATフレームは1個以上のデータグラムからなります。データグラムヘッダにはMainデバイスがどのようなアクセスタイプを実行するのかを記述しています。
- リード、ライト、リード&ライト
- 特定のSubデバイスはノードアドレスを直接アドレス指定、複数のSubデバイスのアクセスは論理アドレス指定 (陰的アドレス指定)
論理アドレス指定はプロセスデータの周期交換に使用します。各データグラムはEtherCATセグメント内のプロセスイメージの特定の部分をアドレス指定して送信します。論理アドレスは4GBのアドレス空間です。ネットワークの起動時にこの論理アドレス空間に各Subデバイスに対し1つ以上のメモリブロックを割り当てます。複数のSubデバイスのデータを割り付けたメモリブロックを1つのデータグラムで送信します。データグラムにはそのメモリブロックのアクセス方法に関するあらゆる情報が完全に含まれ、Mainデバイスはいつ、どのデータを送信するのかを決定できます。例えば、Mainデバイスはドライブ上のデータの更新を高速サイクルタイムで行い、I/Oのサンプリングは低速サイクルタイムで行うことが可能です。つまり、プロセスデータをこれらの要件に合わせて任意に構成できます。これによってMainデバイスは従来の他のフィールドバスシステムに比べて負荷を低減でき、それぞれのノードにデータを個々に送受信する必要はなく、個々のノードのデータをメモリ上のプロセスイメージに並べて一括して送受信するだけで良くなります。
EtherCATではMainデバイスは新しい出力データを1つのEtherCATフレームに詰め込み、自動的にダイレクトメモリアクセス(DMA)経由でMACコントローラに渡してフレームを送信します。新しい入力データの入ったフレームもMACコントローラが受信し、MainデバイスはDMA経由でコンピュータのメモリからフレームをコピーできます。CPUがデータのコピーの処理を直接行う必要はありません。周期データに加え、非周期またはイベント駆動通信も同様にデータグラムを使用します。
EtherCATフレームとオンザフライ処理
論理アドレスに加え、MainデバイスはSubデバイスをネットワーク内の位置でアドレス指定できます。このアドレス指定はネットワークの起動時にネットワークトポロジの確認と設定上のトポロジと比較するのに使用します。
ネットワーク構成の確認後、Mainデバイスは各ノードのConfigured Station Addressを割り当て、ノードとの通信にこの固定アドレスを使用します。これにより指定したSubデバイスにアクセスでき、例えばホットコネクトグループの脱着のように通信中にネットワークトポロジが変更されても特定のSubデバイスを指定できます。Subデバイス間通信には2種類の方法があります。Subデバイスはネットワークの下流に接続した他のSubデバイスに直接データを送信できます。EtherCATフレームは往路方向でだけ処理され、このように直接通信する方式はネットワークトポロジに依存し、装置設計に変更がないような場合のSubデバイス間通信に適用できます(訳注: この直接通信方法は技術的に可能ですが、上流Subデバイスのデータ更新を下流Subデバイスが確認できるような追加メカニズムが必要です。実際は次の方法を一般的に使用します)。一方、Mainデバイスを経由し自由に構成可能なSubデバイス間通信方法もあります。この方法は2周期の通信サイクルが必要です。EtherCATの通信性能は優れているのでこの方法のSubデバイス間通信でも他の通信技術よりも高速にデータ交換できます。
1.3 トポロジの柔軟性
ライン、ツリー、スターあるいはディジーチェイン:EtherCATはほぼすべてのトポロジをサポートしています。EtherCATは単純なバス接続 (ライントポロジ) で数百台のノードを接続でき、スイッチやハブのカスケード接続段数の制限のような制限はありません。
システムのケーブリング時にライントポロジに分岐や支線を活用するとネットワーク構築に便利です。分岐に必要なポートは多くのI/Oモジュールが内蔵し、スイッチや分岐のためのアクティブコンポーネントは使いません。スタートポロジは従来のイーサネットで使用され、それと同じトポロジを構築できます。
モジュール型の装置やツールはネットワークのセグメントや個々のノードをネットワーク運用中に接続・離脱させたいことがあります。EtherCAT Subデバイスコントローラは既にこのホットコネクト [Hot Connect] に対応する機能を内蔵しています。接続した他のノードが離脱すると、そのポートは自動的にクローズし、ネットワークの残りの部分は問題なく通信を継続します。離脱の検出時間は極めて短く15μs以内に円滑に切り替えすることを保証しています。
EtherCATは様々なケーブルタイプをサポートしています。ネットワークのセグメントごとで要件に最適なケーブルタイプを選択できます。100BASE-TXは低コストな産業用イーサネットケーブルで2つのノード間距離最大100mまで対応できます。さらに、拡張プロトコル EtherCAT Pは1本のケーブルでデータ通信と電源供給を可能とします。この拡張機能によってセンサのようなデバイスを一本のケーブルで接続できます。(100BASE-FX)のような光ファイバも選択可能です。例えばノード間の距離が100mを超えるようなときに使用します。イーサネットのケーブリングはEtherCATにそのまま活用できます。
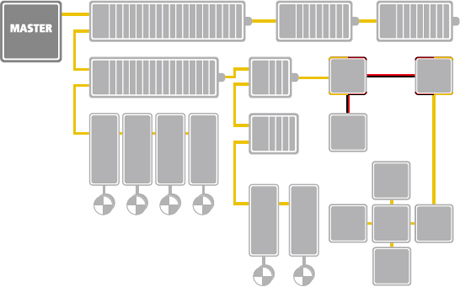
トポロジの柔軟性 – ライン・ツリー・スター
1つのEtherCATセグメントには最大65,535台のデバイスを接続でき、ネットワーク拡張性は事実上無制限です。実用上のノード数は無制限であるので、スライスI/Oノードのようなモジュール型デバイスもそれぞれのモジュール自体がEtherCATノードとして設計でき、このモジュールレベルでEtherCATの性能や特徴を活かした製品を開発できます。つまり、EtherCATでは拡張バスカプラのような考え方の製品は必要なくなり、EtherCATの高性能・高機能性は各モジュールで直接サポートしゲートウェイやバスカプラが不要になるのでその遅延もありません。
1.4 EtherCAT P: 1つのケーブルで通信と電源供給
EtherCAT P (P = パワー) は前述のEtherCAT標準プロトコルへの追加仕様です。EtherCAT Pは通信データの伝送だけでなく、デバイス自体および外部機器の動作電源供給を1本の標準的な4ワイヤのイーサネットケーブルで実現します。
EtherCATとEtherCAT Pはプロトコルレベルで完全に同一であり、違いは物理層に電源カップリングのための拡張を行っていることだけです。EtherCAT P専用のEtherCAT Subデバイスコントローラを新しく用意する必要はありません。EtherCAT PはEtherCATの高性能な通信機能はそのまま継承し、通信ケーブル経由で電源供給できることだけが違いです。この技術は省配線に大きく貢献し、様々なアプリケーションに活用できます。
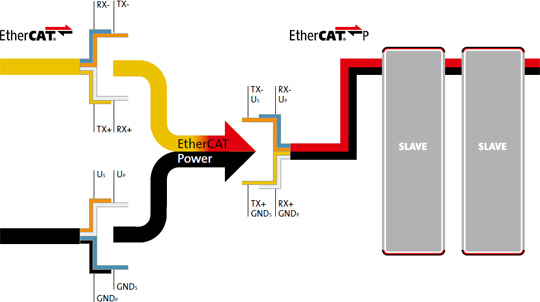
EtherCAT P: 1ケーブルでデータとパワーを
EtherCAT Pはシステムとセンサに供給するUSと、外部機器やアクチュエータに供給するUPがあり、接続したEtherCAT Pデバイスに供給するDC24Vはそれぞれ電気的に絶縁され、独立してスイッチング可能となっています。USとUPの両方の電圧は100Mbit/s EtherCAT通信ラインに直接にカップリングされます。次のデバイスに電源伝達もできるので複数のEtherCAT Pデバイスをノード間に1本のケーブルだけでカスケード接続できます。敷設設備からケーブル本数を減らし、コンパクトかつ費用対効果の高い配線、システムコストの削減、デバイス、ユニット、装置の省スペース化を実現します。
EtherCAT Pは特に装置内で独立して離れた位置にあるような部分に有用であり、1本の短いケーブルでデータ通信と電源供給が可能になります。あらゆる種類のセンサがEtherCAT Pに最適です。1個のコンパクトなM8コネクタで高速ネットにこれらのデバイスを効率的に接続し、電源供給できます。コネクタにはメカニカルキーがあり誤接続による電圧印加でデバイスを破損することもありません。
EtherCAT Pは標準EtherCAT技術と同じネットワーク内で使用できます。EtherCAT物理層とEtherCAT Pの間に適切な整流器を使用し、イーサネットのデータエンコーディングのコンシステンシを維持します。同様にデバイス自身はEtherCAT Pから電源供給し、同時にEtherCATプロトコルを伝送します。
1.5 ディストリビュートクロックによる高精度時刻同期
フィールドに分散した処理に同期動作が必要なアプリケーションでは高精度時刻同期が特に重要です。例えば、複数のサーボ軸が同期動作を行うようなアプリケーションがあります。
完全な同期通信を行う方式では通信エラーが直ちにその精度に影響をあたえるのに比べ、分散同期クロック方式は通信システムのジッタの許容範囲が比較的大きくなります。このため、ノード間同期に対するEtherCATのソリューションはディストリビュートクロック (DC) をベースとしています。
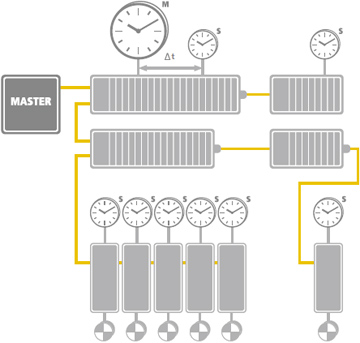
伝送遅延の補正対応の完全ハードウェアベースの時刻同期
クロックのキャリブレーションは完全にハードウェアベースです。最初のDC Subデバイスからの時刻情報が周期的にシステム内のその他すべてのデバイスに配信され、Subデバイスのクロックは正確に参照時計の時刻に補正できます。その結果、システム内の時計のジッタは1μsより十分小さな値を維持します。
参照時計からの時刻情報は、Subデバイスにわずかに遅延して到着します。この伝搬遅延は計測し、同期精度と同時性の維持のために各Subデバイスで補正しなければなりません。この遅延はネットワークの起動時だけでなく、動作中も可能であり、クロックの精度を相互に1μsより十分小さな値に保ちます。
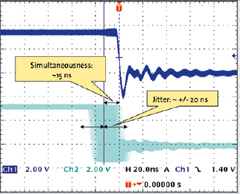
同期性と同時性 – 間に300ノードと120mのケーブルがある2つの分散デバイス間のオシロスコープ計測
すべてのノードが同一の時刻情報をもつことで、それらは出力信号を同時に処理し、入力信号も高精度のタイムスタンプ付きで取得できます。モーション制御アプリケーションでは同期性や同時性に加え周期処理の精度も重要です。このようなアプリケーションでは速度は計測した位置情報から演算し、このために位置計測が等時間間隔 (正確な周期処理) であることが極めて重要です。位置計測タイミングに非常に小さな時間変異があったとしても、特にサイクルタイムが小さい場合には速度計算でその誤差は大きくなることがあります。EtherCATでは位置計測は正確なローカルクロックでトリガし、通信システムとは関与しないため高精度で計測が可能です。
さらに、ディストリビュートクロックはMainデバイスの不可にはなりません。前述のように位置計測はフレーム受信時刻ではなくローカルクロックでトリガされ、Mainデバイスはフレーム送信タイミングにそれほど厳密性を求められません。これによりMainデバイススタックは標準イーサネットハードウェアを使用してソフトウェアで実装されます。数マイクロ秒程度の送信ジッタがあってもディストリビュートクロックの精度が損なわれることはありません。時刻の精度は設定されるタイミングには依存しないのでフレームの絶対送信時刻は重要ではありません。EtherCAT MainデバイスはDCにより割込みがSubデバイスの出力をトリガするタイミングより前にEtherCATテレグラムを送信することだけが要件です。
1.6 診断とエラー箇所の特定
フィールドバスシステムにおいて診断機能は装置の可用性や試運転時間を左右する重要な役割があります。さらに障害発生の検出、障害箇所の特定もトラブルシューティング時に重要です。EtherCATはネットワークの起動時に設定上のネットワークトポロジと実際のトポロジをスキャンして比較します。もちろん、従来システムの診断機能に加え多くの追加機能を提供しています。
各Subデバイス内のEtherCAT Subコントローラは、通信中のフレームのエラーをチェックサムで確認します。通信データはフレームを正しく受信したときにだけSubデバイスアプリケーションに供給します。ビットエラーを検出すると該当するエラーカウンタをインクリメントし、後続のノードにフレーム内にエラーが有ることを通知します。Mainデバイスもフレームの以上を検出し、その情報を破棄します。Mainデバイスはその異常がシステム内で最初に発生した箇所をSubデバイス内のエラーカウンタをチェックして特定できます。これは従来のフィールドバスシステムと比べて極めて大きいアドバンテージであり、従来のフィールドバスはバスライン全体にその影響が広がり、障害発生箇所の特定は極めて困難です。
同じサイクルタイムを使用する場合、ノードごとに単一フレームを使用する他の産業イーサネット技術に比べ、EtherCATのユニークな通信帯域使用方法のおかげでEtherCATフレーム内のビットエラーによって引き起こされる障害の可能性が大幅に低下します。また、EtherCATでよく使用される短いサイクルタイムではエラー回復までの時間を大きく削減できます。このようにアプリケーション内でMainデバイスはこのような問題を簡単に処理できるようになります。
フレーム内では各データグラムの情報はワーキングカウンタを監視してコンシステンシをチェックできます。各ノードはデータグラムでアドレス指定され、そのメモリのアクセスに成功するとワーキングカウンタを自動的にインクリメントします。Mainデバイスはすべてのノードに対しコンシステントなデータで動作していることを周期的に確認できます。ワーキングカウンタが想定した値と異なると、Mainデバイスはそのデータグラムのデータを制御アプリケーションにフォワードせずに破棄します。このときMainデバイスはノードのステータスやエラー情報およびリンク状態を調べ、ノードが予期しないビヘイビアを行った原因を検出します。
EtherCATは標準イーサネットフレームを使用するので、EtherCATネットワーク内のトラフィックはフリーのイーサネットソフトウェアツールで記録し、解析できます。例えば、この種のツールとして一般的によく知られているWiresharkはEtherCATのフレームのプロトコル解析に対応し、コマンド、アドレス、ワーキングカウンタの値などのEtherCAT固有の情報をわかりやすく表示します。
ユーザ向けEtherCAT診断
開発者向けEtherCAT診断
1.7 高可用性
高可用性が求められる機械や装置にとって、ケーブル断線やノード故障はネットワークセグメントにアクセス不能となり、ネットワーク全体の障害を引き起こす大きな問題です。
EtherCATはケーブル冗長化を非常に簡単な方法で実現できます。最後のノードからMainデバイスに追加した2つ目のEtherCAT Mainデバイスポートにケーブルを接続し、ライントポロジをリングトポロジに拡張します。冗長化に必要なソフトウェアはMainデバイススタックにケーブルの断線やノード故障を検出する機能を追加するだけです。
ノード自体には変更は不要であり、Subデバイス自体が冗長化したネットワークで動作していることを「認識こと」も必要ありません。
標準EtherCAT Subデバイスによる低コストなケーブル冗長化
Subデバイス内のリンク検出機能は自動的にリンク状態をチェックし、冗長化対応が必要な状況が発生すると15μs以内で冗長化経路に切り替えます。したがって、たかだか1通信サイクル分のフレームしか喪失しません。つまり、短いサイクルタイムで動作するモーションアプリケーションでケーブル断線が発生してもスムーズに動作を継続できます。
EtherCATでホットスタンバイによるMainデバイス冗長化を実現することも可能です。また、可動部などのネットワークコンポーネントが損傷しやすい部分はディジーチェインの中ではなく支線分岐しておくと、それ以外の部分は障害時も動作を継続できます。
1.8 Safety over EtherCAT
近年の通信システムはリアルタイム性のある制御データ通信だけでなく、クリティカルな安全制御データも同じメディア上で通信できます。EtherCATはSafety over EtherCAT (FSoE = Fail Safe over EtherCAT) プロトコルをセーフティ通信に使用し、このプロトコルには次の特徴があります。
- 制御と安全データの両方を1つの通信システムで実現
- 安全システムアーキテクチャを自由に拡張・変更可能
- セーフティアプリケーションを事前認証ソリューションで簡単化
- 安全機能に対する強力な診断機能
- 装置設計における安全設計のシームレスな統合
- 標準通信とセーフティアプリケーション両方を1つの開発ツールで実現
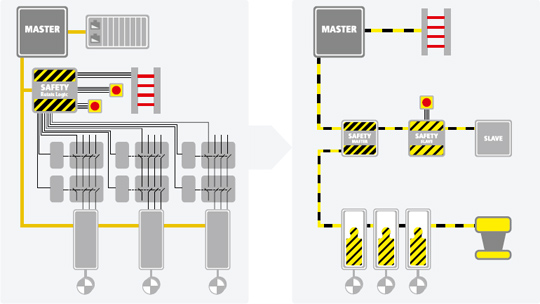
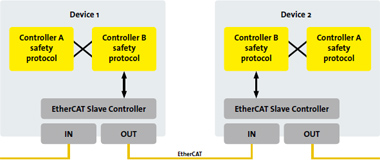
Safety over EtherCATでリレーロジックより簡単かつ自由なアーキテクチャを実現
EtherCATのセーフティ技術はIEC 61508に準拠して開発し、TÜV SÜD Railの認証を受け、かつIEC 61784-3で規格化しています。このプロトコルは安全度水準 SIL 3までのセーフティアプリケーションに対応しています。
Safety over EtherCATを使用すると通信システムはいわゆるブラックチャネルとみなされ、セーフティ関連として考慮する必要がなくなります。標準通信システムであるEtherCATは1つの通信チャネルで標準と安全データの両方を送信できます。セーフティフレームはセーフティコンテナといい、セーフティプロセスデータとそのデータの完全性を保持するための追加情報からなっています。セーフティコンテナはプロセスデータ通信の一部として送信されます。データ通信が安全であるかは使用する通信技術には依存せず、EtherCATに限定されることもありません。セーフティコンテナはイーサネットやその他の同様の技術によるフィールドバスシステムを経由して伝送でき、銅線ケーブル、光ファイバさらにはワイヤレス通信も使用できます。
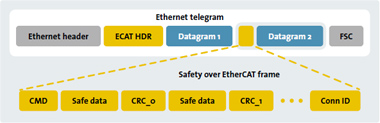
周期プロセスデータ通信に埋め込まれたセーフティコンテナ
このような柔軟性により、装置内の各部間の接続は非常に単純になります。セーフティコンテナは様々コントローラを経由してルーティングされ、装置の様々な部分で処理されます。これにより装置全体の非常停止機能や特定の部分だけの停止を簡単に行なえます。たとえ装置の一部がイーサネットなどの他の通信システムで接続されていても構いません。
デバイスにFSoEプロトコルを実装するのに必要となるリソースは最小限であり、短いリアクションタイムの高レベルの性能を得られます。ロボット産業ではSoEを使用した安全モーション制御アプリケーションを8kHzのクローズドループで使用している例があります。
ブラックチャネルの原理: 標準通信インタフェースを使用
Safety over EtherCATの詳しい情報はETGウェブサイトで提供しています。
1.9 通信プロファイル
Subデバイスを設定、診断するために非周期通信を使用してネットワークから内部の変数にアクセスできます。これはメッセージ障害の自動回復機能のある、信頼性のあるメールボックスを使用します。
各種デバイスやアプリケーション層プロトコルをサポートするために、以下のようなEtherCAT通信プロファイルが定義されています。
- CAN application protocol over EtherCAT (CoE)
- Servo drive profile, according to IEC 61800-7-204 (SoE)
- Ethernet over EtherCAT (EoE)
- File Access over EtherCAT (FoE)
- Automation Device Protocol over EtherCAT (ADS over EtherCAT, AoE)
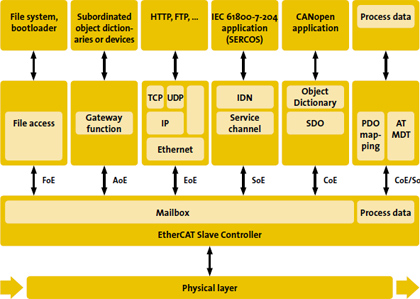
同一システム内に共存可能な様々な通信プロファイル
Subデバイスはすべての通信プロファイルをサポートする必要はなく、最もその用途に適したもの選択します。Mainデバイスはどの通信プロファイルがSubデバイスでサポートされているかをSubデバイスの記述ファイル (ESI) でわかります。
1.9.1 CAN application protocol over EtherCAT (CoE)
EtherCATはCoEプロトコルでCANopen®規格 EN 50325-4と同等の通信メカニズムを提供しています。つまり、オブジェクトディクショナリ、PDO(プロセスデータオブジェクト)マッピングおよびSDO(サービスデータオブジェクト)があり、通信管理機能も同等です。CANopen®に対応したデバイスを過去に開発している場合、EtherCAT Subデバイスの開発労力は最小限にでき、CANopen®ファームウェアの大部分を再利用できます。EtherCATのオプション拡張として従来の8byteのPDOサイズ制限はなくなり、オブジェクトディクショナリ全体のアップロードをサポートするようなEtherCATの拡大した通信帯域を活用できます。ドライブプロファイル CiA 402のようなデバイスプロファイルもEtherCATで再利用可能です。
1.9.2 IEC 61491-7-204 over EtherCAT (SoE)に準拠したサーボドライブプロファイル
SERCOS™ はリアルタイム通信インタフェースとしてよく知られ、特にモーション制御アプリケーションで使用されています。サーボドライブに対する SERCOS™プロファイルは国際規格 IEC 61800-7に含まれています。この規格内でこのプロファイルのEtherCATへのマッピングが定義されています。ドライブ内部のパラメータや機能にアクセスするためのサービスチャネルはEtherCATメールボックスにマッピングされています。
1.9.3 Ethernet over EtherCAT (EoE)
EtherCATは物理層がイーサネットであり、イーサネットフレームを使用します。「イーサネット」という用語はしばしばTCP/IP接続を使用したITアプリケーションのデータ通信方法として使用されることがあります。
標準ITプロトコルを透過的に転送
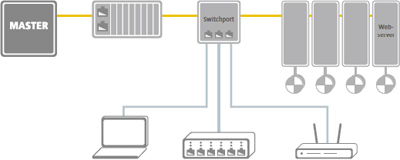
Ethernet over EtherCAT (EoE)プロトコルを使用するとあらゆるイーサネットデータをEtherCATセグメントを経由して送信できます。イーサネットデバイスはEtherCATセグメントといわゆるスイッチポートを経由して接続します。イーサネットフレームはEtherCATプロトコルによってトンネル化します。つまり、TCP/IP, VPN, PPPoE (DSL)のようなインターネットプロトコルは接続したイーサネットデバイスに対しEtherCATネットワークは完全に透過的です。スイッチポートのあるデバイスはTCP/IPフラグメントをEtherCAT通信トラフィック内に適切に挿入するのでネットワークのリアルタイム性への影響はありません。
さらに、EtherCATデバイスはHTTPのようなイーサネットプロトコルをサポートでき、EtherCATセグメントの外側に対して標準イーサネットノードのように振る舞うことも可能です。Mainデバイスはレイヤ2スイッチのように動作し、MACアドレスが対応するノードにフレームをEoEで送信します。この方法により、すべてのインターネット技術をEtherCAT環境に実装でき、ウェブサーバ、E-mail, FTP通信などを実装できます。
1.9.4 File access over EtherCAT (FoE)
TFTP(Trivial File Transfer Protocol)と同様のこのシンプルなプロトコルはデバイス内のファイルアクセスを可能とし、EtherCATネットワーク経由でデバイスにファームウェアをアップロードする共通の方法を提供します。このプロトコルは必要最小限となるように配慮して規定され、ブートローダプログラムでサポートできるようにしています。TCP/IPスタックは不要です。
1.9.5 ADS over EtherCAT (AoE)
ADS over EtherCAT (AoE)はメールボックスベースのクライアント・サーバプロトコルとして規定されました。CAN application protocol over EtherCAT (CoE)ようなプロトコルが詳しくセマンテックな概念を提供しているのに対し、AoEはルーティング可能かつ並列サービスの処理が必要となるような機能を補完するために定義されました。たとえば、PLCプログラムからEtherCATネットワークでゲートウェイを経由してCANopen®, IO-Link™やその他のサブネットワークにアクセスする手段を提供します。
AoEはインターネットプロトコル(IP)で提供している同様のサービスと比べオーバーヘッドを大幅に削減するように設計されています。送信側と受信側をアドレス指定するパラメータが常にAoEテレグラムに含まれ、その結果、両端のデバイス (クライアントおよびサーバ)で非常にコンパクトな実装が可能です。AoEはEtherCATオートメーションプロトコル (EAP) 経由の非周期通信としても選択され、MESシステムとEtherCAT Mainデバイス、ゲートウェイ下層のフィールドバスなどとシームレスな通信プロトコルを提供します。AoEはEtherCATねとワーク診断情報はリモート診断ツールで取得するための標準手段も提供します。
1.10 EtherCATオートメーションプロトコル(EAP)によるプラントレベル通信
プロセス管理レベルでは先のセクションで述べたようにEtherCATデバイスプロトコルの要件とはわずかに異なる特殊な通信要件があります。装置あるいは装置のセクションで相互に状態情報や次の製造段階に関する情報をの交換を行わなければならないことがあります。また、全生産プロセスを監視する集中管理コントローラがあり、それがユーザに生産状況、各種装置の指示割当などの情報を提供します。EtherCATオートメーションプロトコル (EAP) はこのような要件を満足します。
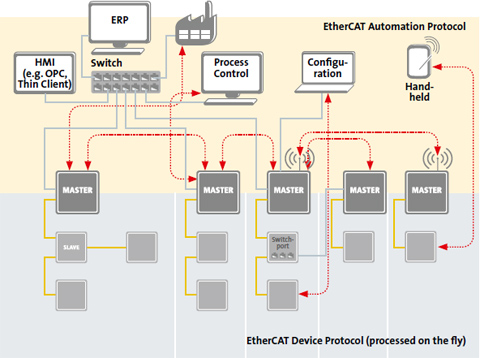
EtherCATによる工場レベル通信
このプロトコルは次にようなインタフェースとサービスを定義しています。
- EtherCAT Mainデバイス間のデータ交換 (Mainデバイス間通信)
- マンマシンインタフェース(HMI)との通信
- 上位コントローラからEtherCATセグメント内のデバイスにアクセス (ルーティング)
- 装置あるいはプラント設定・デバイス設定用ツールの統合
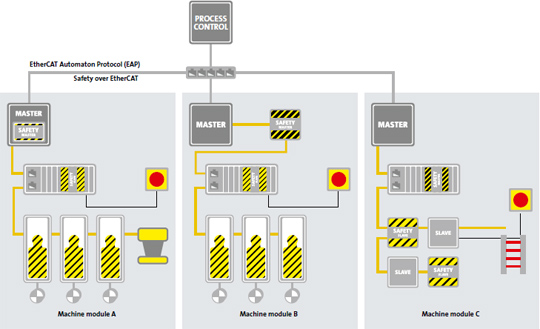
EtherCATオートメーションプロトコルとSafety over EtherCATによる工場レベル通信アーキテクチャ
EAPで使用する通信プロトコルは国際規格 IEC 61158 に含まれています。EAPはワイヤレスを含みあらゆるイーサネット接続を使用して送信でき、たとえば、AGV(Automated Guided Vehicle)との通信で使用したり、半導体や自動車産業で使用されています。
EAPによる周期プロセスデータ交換は「プッシュ」または「ポーリング」のいずれかの方式で行います。プッシュモードでは各ノードはデータをそれぞれ自身のサイクルタイムまたはそのサイクルタイムの逓倍で送信します。各受信側は特定の送信側からの受信データを設定できます。送信側および受信側のデータの設定はEtherCATで一般的なオブジェクトディクショナリで指定します。ポーリングモードではノード(一般的にコントローラ)は他のノードにテレグラムを送信し、各ノードはその応答として自身のテレグラムを送信します。
周期EAP通信はイーサネットフレーム内に直接埋め込まれ、IPなどのトランスポートまたはルーティングプロトコルは使用せず行えます。イーサタイプ 0x88A4はEtherCATで使用するフレームであることを表します。これによりEAPはミリ秒サイクルで高性能にデータを交換できます。分散した装置間でデータのルーティングが必要な場合はプロセスデータをUDP/IPあるいはTCP/IPを使用して送信することも可能です。
さらに、Safety over EtherCATプロトコルを使用してEAP経由で安全データを送信できます。これは大規模な装置の各制御部で安全データを交換し、全体の非常停止を行いたい場合や周辺の装置に非常停止を通知するのに必要な機能です。
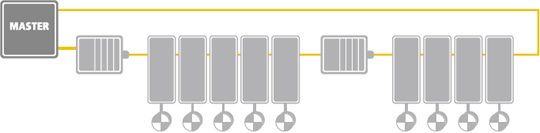
1.11 他フィールドバスシステムの統合
EtherCATの余裕のある通信帯域はEtherCATゲートウェイ経由で下層のフィールドバスネットワークとの通信を埋め込む事が可能であり、旧来のフィールドバスからEtherCATに移行する際にこの機能は特に有効です。段階的にEtherCATに移行するようなときにEtherCATインタフェースを未サポートのオートメーションコンポーネントの使用を継続できます。
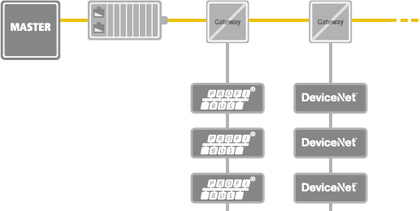
フィールドバスインタフェースの分散化
ゲートウェイを分散化して統合すると、拡張スロットが不要になるので産業用PCのサイズを小型化でき、組込み用の産業用PCなども使用できるようになります。従来はフィールドバスMainデバイスやSubデバイスインタフェース、高速シリアルボードのような通信カードを拡張スロットに追加する必要がありましたがこれらは不要になります。EtherCATではこれらのデバイスの接続に1つのイーサネットポートがあれば十分です。下層のサブシステムからのプロセスデータはEtherCATシステムのプロセスデータとして直接アクセスできるようになります。
1.12 EtherCAT, TSN, Industrie 4.0およびIoTによるデジタル通信の強化
プロセス最適化、予防保全、MaaS(Manufacturing as a Service), 適応システム、リソース削減、スマートファクトリ、コスト削減、これらは制御ネットワークデータを上位レベルシステムで使用するための数多くの意味ある理由の一部です。IoT(Internet of Things), Industrie 4.0, 中国製造2025, Industrial Value Chain Initiativeにはシームレスに連続し、標準化した通信をあらゆるレベルで行えるようにこの境界を越えるための共通の要件があります。クラウドにアップロードするセンサデータと併せ、ERPシステムから分散デバイスにダウンロードするレシピやパラメータは、例えば2台の装置で共有する供給システムで使用します。このような事例では水平方向と水調方向の両方のデータフローが必要です。EtherCATは本質的にその高性能、フレキシブルかつオープンなインタフェースを通じてこのようなデジタルデータ伝送の要件に適合しています。卓越したシステム性能は制御ネットワークにビッグデータ機能を追加するための前提条件です。
EtherCATは既存システムをコントローラに変更を加えたり、Subデバイスを更新したりすることなくクラウド接続機能を追加できる柔軟性があります。エッジゲートウェイはEtherCAT Subデバイス内のあらゆるデータをEtherCAT Mainデバイスのメールボックスゲートウェイ機能を介してアクセスできます。エッジゲートウェイはリモートデバイスでTCPまたはUDP/IPでMainデバイスと通信する形態や、EtherCAT Mainデバイス自身と同じハードウェア上のソフトウェアコンポーネントとして共存する形態のいずれも可能です。
さらに、オープンなインタフェースによりOPC UA, MQTT, AMQPなどのあらゆるITベースプロトコルに対応でき、それはMainデバイスの機能もしくは直接Subデバイスに実装できます。このようにIoTとしての直接リンクができることはセンサからクラウドまでプロトコルの不連続がないことになります。
これらすべての機能は当初からEtherCATプロトコルの一部であり、そのアーキテクチャの先見性を示しています。またなお、進化のためにさらなるネットワーク機能を追加し組み込みことも可能です。もちろん、拡張を行うときに従来システムのことを考慮することも必要です。意味のある新機能を追加してもEtherCATプロトコルが2003年のリリース以来「バージョン1」として安定であり全ネットワークの継続性を維持することが重要です。
他にはタイムセンシティブネットワーク(TSN)の分野における新規拡張機能でコントローラ間通信のリアルタイム性能を改善できます。TSNを活用すると、制御システムはそれがクラウドベースでもEtherCAT Subデバイスネットワークや向上フロアレベルネットワークを経由してアクセスできます。EtherCATは通常1つのフレームでネットワーク全体にアクセスでき、このアクセス方式は必要最小限の帯域仕様で他のフィールドバスや産業用イーサネット技術に比べ高速です。実際にEtherCAT Technology Groupの専任技術者がIEEE 802.1 TSNタスクグループで当初から、かつてAVBと言われていた時代からこの活動に携わってきました。
EtherCAT Technology Group(ETG)はOPC Foundationとパートナになった最初のフィールドバス団体でもあります。OPC UAプロトコルはEtherCATポートフォリオを補完します。この技術はスケーラブルなTCP/IPベースのクライアント/サーバ通信技術であり、セキュリティ機能の統合、MES/ERPしすてむとの暗号化データ通信に対応しています。OPC UA Pub/SubはOPC UAによる装置間通信(M2M)アプリケーションを改善し、クラウドベースサービスまでの垂直通信が可能です。ETGはシームレスにEtherCAT環境と共存できるようにこれらの開発に協力しています。
つまり、EtherCATはIoT Readyであるだけでなく、EtherCAT自体がIoTです。
![]()
2. EtherCATインタフェースの実装
EtherCAT技術は低コスト設計が可能となるように最適化され、EtherCATインタフェースをセンサ、I/Oデバイス、組込みコントローラに追加してもデバイスのコストアップはわずかです。さらに、EtherCATインタフェースは高性能なCPUを必要としません。CPUに必要な要件は目的とするSubデバイスアプリケーションの処理性能を満たしていることだけです。
ハードウェア及びソフトウェアの要件に加え、開発サポートや通信スタックの有無はインタフェースを開発する際に重要となります。EtherCAT Technology Groupは全世界で開発サポート提供し、質問に対する回答や技術課題の相談に迅速に対応します。また、評価キットは複数のメーカから提供され、開発ワークショップやフリーのSubデバイスサンプルコードで開発立ち上げをサポートします。
エンドユーザにとって最も重要なことはマルチベンダからのEtherCATデバイス間のインタオペラビリティです。インタオペラビリティ向上のためデバイスメーカはデバイスを供給する際にコンフォーマンステストの合格が義務付けられています。テストでは実装がEtherCAT仕様に適合することを確認し、テストはEtherCATコンフォーマンステストツール(CTT)で実行します。CTTはデバイスの開発中に使用すれば、早期にエラーを検出し実装を修正できます。
2.1 Mainデバイス
EtherCAT Mainデバイスのインタフェースにはただ1つ非常に簡単なハードウェア要件があります。それはイーサネットポートであるということです。実装においてオンボードイーサネットコントローラや低コストなネットワークカードを使用でき、特殊なインタフェースカードは必要ありません。これは標準イーサネットポートを使えばMainデバイスでハードウェアリアルタイムネットワークソリューションを実装できることを意味します。
ほとんどの場合、イーサネットコントローラはダイレクトメモリアクセス(DMA)機能をもっています。つまり、CPU機能をMainデバイスとネットワーク間のデータ伝送に使用する必要がありません。EtherCATネットワークではSubデバイスのプロセスデータは論理アドレス空間にマッピングされ、プロセスイメー図を構成します。各Subデバイスはフレームを通過させるときにプロセスイメージのアドレス指定されあt正しい場所にデータをライトし、またリードを行います。したがってMainデバイスフレームに到着した時点で正しく構成されたプロセスイメージとして受信します。
MainデバイスのCPUはプロセスイメージの再構成を行う必要がないため、その性能要件はEtherCATインタフェースではなく、対象のアプリケーションの要求性能に依存します。特に小規模、中規模あるいは機能を明確に定義したアプリケーションにおいてはEtherCAT Mainデバイスの実装は簡単です。EtherCAT Mainデバイスはさまざまなオペレーティングシステム実装されています。WindowsやLinuxの各種ディストリビューション、QNX, RTX, VxWorks, Intime, eCosなどはほんの一例です。
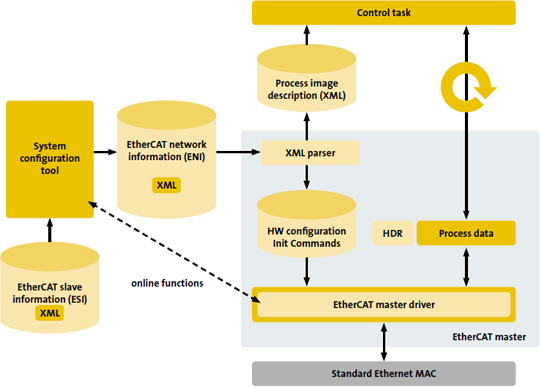
一般的なEtherCAT Mainデバイスのアーキテクチャ
ETGメンバからEtherCAT Mainデバイスの実装をサポートするさまざまなオプションが提供されています。例えば、EtherCAT Mainデバイスライブラリの無償ダウンロード、サンプルMainデバイスコード、各種リアルタイムオペレーティングシステムとCPUを対象とした開発まで含めた完全なソリューション(サービスを含む)などがあります。
ネットワークを管理するためにEtherCAT Mainデバイスは周期プロセスデータ構造と各Subデバイスのブートアップコマンドが必要です。これらのコマンドはEtherCAT設定ツールを使用し、EtherCATネットワーク情報(ENI)ファイル形式でエクスポートされます。接続したデバイスのEtherCAT Subデバイス情報(ESI)ファイルはENIの作成に使用されます。
使用可能なMainデバイス実装の種類やそれらがサポートする機能にはさまざまなものがあります。対象とするアプリケーションに応じ、オプション機能をサポートするのか、用途に合わせハードウェアやソフトウェアリソースに利用状態が最適できるように省くのかを選択します。このため、EtherCAT Mainデバイスは2つのカテゴリに分類され、クラスA Mainデバイスは標準EtherCAT Mainデバイス、クラスB Mainデバイスは機能限定したMainデバイスとしています。原則、すべてのMainデバイス実装はクラスAに分類されるようにします。クラスBはローエンドの組込みシステムなど使用できるリソースが十分でなくクラスAのすべての機能をサポートできないような場合にだけに限定的に使用します。
2.2 Subデバイス
EtherCAT Subデバイスは低コストのEtherCAT Subデバイスコントローラ (ESC) をASIC, FPGAまたは標準マイコン内蔵チップとして使用します。シンプルSubデバイスはマイコンは必要なく、デジタル入出力を直接にESCに接続します。コンプレックスSubデバイスでは通信性能はほとんどマイコンの性能には依存せず、多くの場合8bitマイコンでも十分です。
EtherCAT Subデバイスコントローラは複数のメーカから供給され、内蔵DPRAMのサイズやフィールドバスメモリ管理機能 (FMMU)の数などは機種により異なります。プロセスデータインタフェース(PDI)はいくつかの種類があり、アプリケーションコントローラからDPRAMに外部アクセスするためのインタフェースです。
- 32bitパラレルI/Oインタフェースは最大32点のデジタル入出力の接続に適し、32bitデータで十分勝つアプリケーションコントローラの不要なシンプルなセンサやアクチュエータで使用。
- シリアルペリフェラルインタフェース (SPI) はアナログI/Oデバイス、エンコーダ、その他の簡単なデバイスなど小さなサイズのプロセスデータの場合に最適。
- パラレル 8/16bit マイコンインタフェースは大きなデータサイズに適し、フィールドバスコントローラから内蔵DPRAMにアクセスするための一般的インタフェース
- FPGAおよびオンチップバリエーション用に、さまざまなマイクロコントローラーに適した同期バスを実装
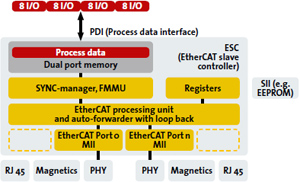
Subデバイスハードウェア: 直接I/O対応のEtherCAT Subコントローラ
ハードウェア設定はSubデバイス情報インタフェース(SII)というEEPROMなどの不揮発メモリに保存し、デバイスの基本機能に関する情報が記述されています。これによりMainデバイスは起動時にこの情報をリードし、デバイス記述ファイル (ESI) がなくてもデバイスを起動できます。EtherCAT Subデバイス情報 (ESI) ファイルはデバイスとともに提供されるXMLベースのファイルであり、プロセスデータやその構成オプション、サポートするメールボックスの種類とそのオプション機能、サポートする動機モードなどのネットワークアクセスのためのプロパティの完全な情報です。ネットワーク設定ツールはこの情報をネットワークのオンラインおよびオフライン設定で使用します。
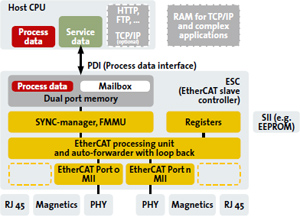
Subデバイスハードウェア: EtherCAT Subデバイスコントローラ + ホストCPU
様々なメーカからSubデバイスを実装するための評価キットが提供されています。これらのキットはSubデバイスアプリケーションをソースコードで、また、場合により評価用Mainデバイスも同梱しています。評価キットを使用するとほんの数ステップで完全に機能するEtherCAT Mainデバイス・Subデバイスネットワークをテストできます。ETGウェブサイトではSubデバイス実装ガイドで開発に役立つ知識やヒント、Subデバイス実装のための必要なドキュメントを解説しています。
ETG.2200 EtherCAT & EtherCAT P Subデバイス実装ガイド
3. コンフォーマンスと認証
通信規格が普及するための2つの重要な条件は、コンフォーマンス (仕様適合性) と相互運用性です。EtherCAT Technology Groupは各デバイス実装に対し (自動化したEtherCATコンフォーマンステストツールによって) コンフォーマンステストを要件とし、EtherCAT Mainデバイス、SubデバイスおよびEtherCAT設定ツールについても相互運用性を様々な普及活動において提供しています。
3.1 プラグフェスト
複数デバイス間の相互運用性をテストしたいとき、それらのデバイスを相互接続することが最も実際的なアプローチです。この考えのもと、毎年、ETGはいわゆるプラグフェストを複数回開催しています。プラグフェスとは2日間のイベントです。プラグフェスト開催時にはMainデバイスとSubデバイスメーカが集まり、それぞれの組み合わせで各デバイスがどのようなビヘイビアをとるのかチェックし、実際のアプリケーションにおけるデバイスの相互運用性を改善します。ETGは欧州、北米、日本でプラグフェストを定期開催し、その他のアジア地域で隔年開催しています。
3.2 コンフォーマンステストツール (CTT)
EtherCATコンフォーマンステストツール (CTT) はEtherCAT Subデバイスのビヘイビアのテストを自動化しました。CTTはWindowsのプログラムであり、標準イーサネットポートで動作します。ツールはEtherCATフレームを被テストデバイス (Device under Test; DuT) に送信し、そのレスポンスを受信します。テストケースはデバイスからのレスポンスが仕様定義されたレスポンスに準拠すると合格と判定します。テストケースはXMLファイルに記述され、テストツール自体の変更を行うことなくテストケースの拡張や変更を行えるようになっています。TWGコンフォーマンスは現在有効なテストケースの規定とリリースを管理しています。プロトコルテストに加え、CTTはEtherCAT Subデバイス情報 (ESI) ファイル内の記述の妥当性も検査します。さらにCTTはCiA402ドライブプロファイルのようなデバイス固有のプロトコルテストも行います。すべてのテストステップと結果はテストロガーに保存され、結果の解析やデバイスのリリース時の検証ドキュメントとして保存できます。
3.3 コンフォーマンス技術作業部会
EtherCATコンフォーマンステストポリシでは、デバイスメーカは各デバイスを市場の供給する前にその時点の現行バージョンのEtherCATコンフォーマンステストツールでテストすることが義務となっています。デバイスメーカはこのテストを自己テストとして行うこともできます。ETG技術委員会 (TC) はコンフォーマンス技術作業部会 (TWG) を設置し、このTWGはテスト手順、テスト内容やコンフォーマンステストツールの実装機能などの定義を行っています。TWGコンフォーマンスは継続的にテスト内容とその厳密性の強化を行っています。TWGコンフォーマンスは相互運用性テストの定義も行い、EtherCAT相互運用性テストネットワーク内でデバイスの動作をテストします。
3.4 EtherCATテストセンタ
公式EtherCATテストセンタ (ETC) は欧州、日本、中国および北米にあるETGが認定した機関であり、公式EtherCATコンフォーマンステストサービスを提供します。EtherCATコンフォーマンステストはCTTによる自動テスト、EtherCATネットワーク内の相互運用性テスト、デバイスのインジケータの動作やラベルの確認およびEtehrCATインタフェースのテストからなります。
公式テストは義務ではありませんが、ETGはデバイスメーカが積極的にETCでデバイスをテストし、認証を受けることを推奨しています。公式コンフォーマンステストに合格すると、ETGはそのデバイスに対しEtherCATコンフォーマンステスト合格認定証を発行します。合格認定証はETCでコンフォーマンステストを受験して合格したデバイスにのみ発行され、自己テストのデバイスには提供されません。
認定EtherCATテストセンタには追加のテストがあり、これによって互換性に関するテストを厳しく行い、そのEtherCAT実装がEtherCATデバイスとして定義した統一動作と診断機能を有することを審査します。エンドユーザは開発中のアプリケーションにEtherCATデバイスを選定する際にはEtherCATコンフォーマンステスト合格認定証を受けた製品であるかをチェックし、合格製品から選定することをおすすめします。
4. 国際規格
EtherCAT Technology GroupはIECの公式パートナーです。EtherCATとSafety over EtherCATはIEC規格 (IEC61158, IEC61784) 化済みです。これらの規格は下位のプロトコル層から上位のアプリケーション層やドライブなどのデバイスプロファイルまでを含んでいます。SEMI™ (Semiconductor Equipment and Materials International)はEtherCATを半導体製造装置の通信規格 (E54.20) として受け入れました。ETG半導体技術作業部会(TWG)内の各種タスクグループが半導体製造装置内で使用するデバイス固有のプロファイルと実装ガイドラインを定義しています。EtherCATの技術仕様書は英語、日本語、韓国語および中国語で公開しています。